
F. M. GAUSIANA Y TIPO CAMPANA
Una FM gausiana se especifica con dos parámetros { c, ? }; c representa el centro de la FM y ? determina su anchura.
Una FM del tipo campana generalizada (o FM tipo campana) se caracteriza mediante tres parámetros { a, b, c }; donde c y a definen el centro y el ancho de la FM, respectivamente, mientras que el parámetro b controla las pendientes en los puntos de cruce.

FORMAS DE ONDA
Las FM que se muestran en la figura corresponden a las definidas por los siguientes valores: triángulo(x; 6, 7, 9), trapecio(x; 5, 6, 8, 10), gauss(x; 0.7, 3) y campana(x; 1.5, 5, 3).
SINGLETON
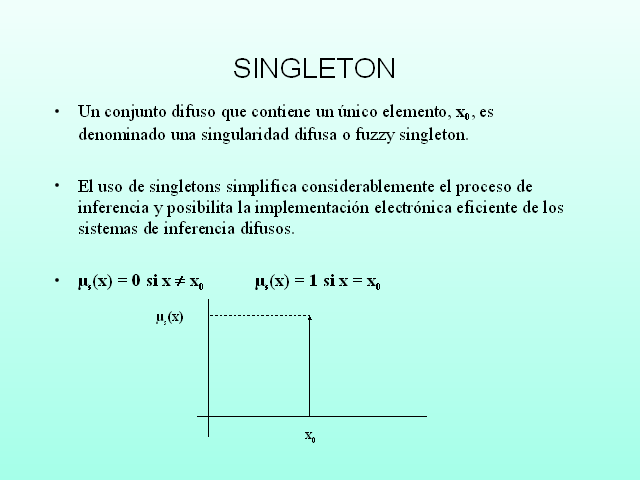
Un conjunto difuso que contiene un único elemento, x0, es denominado una singularidad difusa o fuzzy singleton.
El uso de singletons simplifica considerablemente el proceso de inferencia y posibilita la implementación electrónica eficiente de los sistemas de inferencia difusos.
µs(x) = 0 si x ? x0 µs(x) = 1 si x = x0
x0
µs(x)

REGLAS DIFUSAS IF….THEN
Los conjuntos y los operadores difusos son los sujetos y predicados de la lógica difusa. Las reglas if-then son usadas para formular las expresiones condicionales que abarca la lógica difusa
if x is A then y is B
Donde A y B son los valores lingüísticos definidos por los conjuntos definidos en los rangos de los universos de discurso llamados X e Y, respectivamente.
La parte if de la regla ´x es A´ es llamada el antecedente o premisa, mientras la parte then de la regla ´y es B´ es llamada la consecuencia o conclusión

ESTRUCTURA DEL SISTEMA
La fusificación de las variables de entrada.
Aplicación del operador difuso (AND ó OR) en el antecedente.
Implicación del antecedente con el consequente.
Agregación de los consecuentes a través de las reglas.
La defusificación.
ESTRUCTURA DEL SISTEMA
Regla 1
Regla 2
Regla 3
?
Salida
Entrada 1
Entrada 2
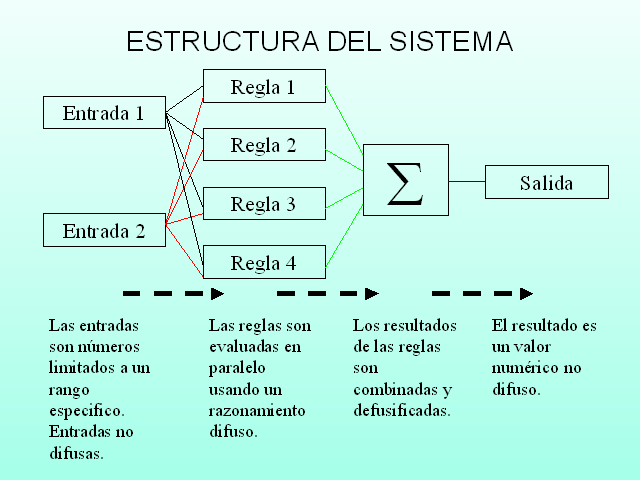
Las entradas son números limitados a un rango especifico. Entradas no difusas.
Las reglas son evaluadas en paralelo usando un razonamiento difuso.
Los resultados de las reglas son combinadas y defusificadas.
El resultado es un valor numérico no difuso.
Regla 4

FUSIFICACIÓN DE LAS ENTRADAS
Para cada entrada existen diferentes conjuntos con variables lingüísticas, en nuestro caso hay dos subconjuntos para cada variable de entrada.
X = {BAJO, ALTO}
Y = {BAJO, ALTO}
Las variables de entrada X e Y, al igual que la variable de salida Z pertenecen al mismo universo de discurso comprendido en el rango entre 0 y 10.
Las funciones de membresía son:
BAJO(T) = 1 – ( T / 10 )
ALTO(T) = T / 10

FUSIFICACIÓN DE LAS ENTRADAS
10
1
Entrada no difusa = 5
Salida difusa = 0,5
REGLAS DEL SISTEMA
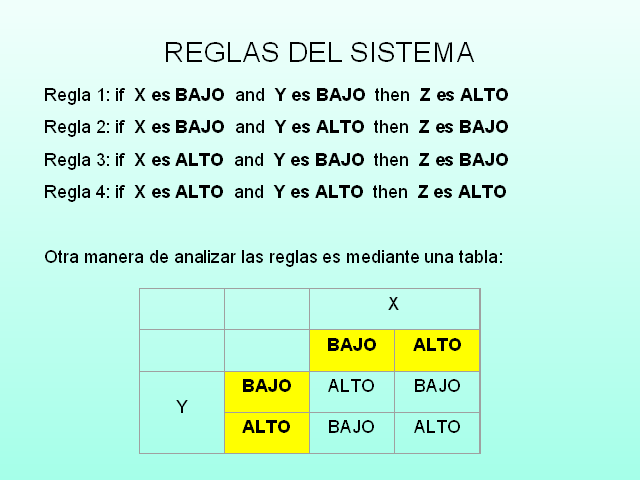
Regla 1: if X es BAJO and Y es BAJO then Z es ALTO
Regla 2: if X es BAJO and Y es ALTO then Z es BAJO
Regla 3: if X es ALTO and Y es BAJO then Z es BAJO
Regla 4: if X es ALTO and Y es ALTO then Z es ALTO
Otra manera de analizar las reglas es mediante una tabla:
(Gp:)
(Gp:)
(Gp:) X
(Gp:)
(Gp:)
(Gp:) BAJO
(Gp:) ALTO
(Gp:)
Y
(Gp:) BAJO
(Gp:) ALTO
(Gp:) BAJO
(Gp:) ALTO
(Gp:) BAJO
(Gp:) ALTO

APLICAR EL OPERADOR DIFUSO
Una vez que las entradas han sido fusificadas, conocemos el grado en el cual cada parte del antecedente ha sido satisfecho para cada regla.
Sí el antecedente de una regla dada tiene más de una parte, el operador difuso es aplicado para obtener un número que represente el resultado del antecedente para esa regla.
Para la operación AND existen dos formas conocidas como min (mínimo) y prod (producto algebraico).
Para la operación OR existen dos formas conocidas como max (máximo) y sum (suma algebraica).
Además de estos métodos de construcción, uno puede crear su propio método para AND y OR escribiendo cualquier función.

APLICAR EL OPERADOR DIFUSO
El grado de verdad para la premisa de una regla es referida como el nivel de disparo y es denotada como ? (alfa).
(Gp:) X
(Gp:) Y
(Gp:) BAJO(X)
(Gp:) ALTO(X)
(Gp:) BAJO(Y)
(Gp:) ALTO(Y)
(Gp:) ?1
(Gp:) ?2
(Gp:) ?3
(Gp:) ?4
(Gp:) 0
(Gp:) 0.32
(Gp:) 1
(Gp:) 0
(Gp:) 0.68
(Gp:) 0.32
(Gp:) 0.68
(Gp:) 0.32
(Gp:) 0
(Gp:) 0

METODO DE IMPLICACION
Un consecuente es un conjunto difuso representado por una función de membresía, en nuestro caso tiene asignada dos, las cuales son:
Z = { BAJO, ALTO }
Hay dos métodos conocidos que son las mismas funciones usadas por el método AND: min (mínimo), que trunca el conjunto difuso de salida, y el PROD (producto), el cual escala al conjunto difuso de salida.
El grado de verdad de la premisa de cada regla es computada y aplicada al consecuente de cada regla. Este resultado es un subconjunto difuso que será asignado a cada variable de salida correspondiente. Nosotros aplicamos en este ejemplo el método de Mamdani ó método de inferencia MIN-MAX. Para cada regla hacemos el MIN entre el nivel de disparo y la función de membresía de la variable de salida indicada en el consecuente.

METODO DE IMPLICACION

METODO DE AGREGACION
Agregación o composición es el proceso por el cual los conjuntos difusos que representan las salidas de cada regla son combinadas en un único conjunto difuso.
La salida del proceso de agregación es un conjunto difuso para cada salida variable.
Los dos métodos más conocidos son: max (máximo) y sum (suma).
Lo más común cuando usamos la función 'min' en el método de implicación es corresponder con la función 'max' en el método de agregación.
De igual manera si elegimos la función 'prod' para el método de implicación, es usual hacerlo corresponder con la función 'sum' para el método de agregación.

METODO DE AGREGACION
En el proceso de composición o agregación, todos los subconjuntos difusos son combinados para dar un único conjunto de salida, esto se logra haciendo el MAX de las funciones mostradas en los gráficos anteriores, obteniéndose la siguiente figura:
DEFUSIFICACION
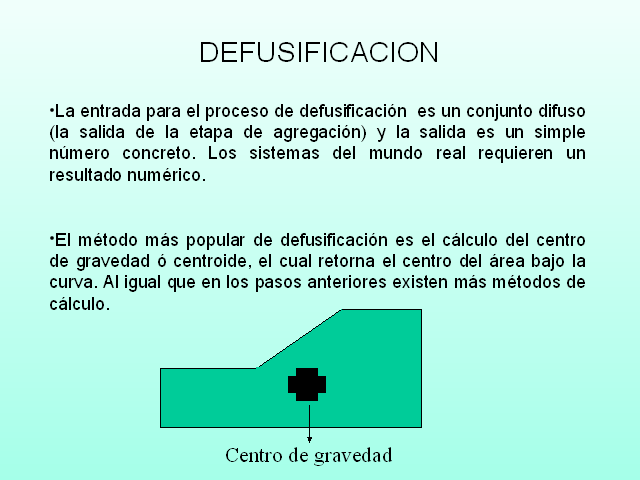
La entrada para el proceso de defusificación es un conjunto difuso (la salida de la etapa de agregación) y la salida es un simple número concreto. Los sistemas del mundo real requieren un resultado numérico.
El método más popular de defusificación es el cálculo del centro de gravedad ó centroide, el cual retorna el centro del área bajo la curva. Al igual que en los pasos anteriores existen más métodos de cálculo.
Centro de gravedad

DEFUSIFICACION
Forma continua
Para calcular el algoritmo del centro de gravedad (cog, siglas en ingles) dividimos al Momento de la función por el Area de la función:
Forma discreta
Se divide la función en partes iguales y se calcula haciendo la sumatoria de todos los puntos de la siguiente manera:
Hay que tener en cuenta que al dividir en partes iguales al conjunto de salida se simplifican los ?z, si las particiones fueran diferentes habría que tener en cuenta el ?z porque sino se pierde el sentido de Momento y Area de la función.

DEFUSIFICACION
Forma continua:
Forma discreta para 10 muestras:

PRODUCTO CARTESIANO
El producto cartesiano es usado para definir una relación entre dos o más conjuntos (sean ordinarios o difusos).
El producto cartesiano es denotado como AxB y es definido como:
Una relación difusa R de A y B es un subconjunto difuso de AxB, donde ?R(a, b) es la función de membresía de R.
R también puede ser representado como una matriz, depositando cada elemento de ?R(a, b):

IMPLICACION
La regla 'si el nivel es bajo, entonces abro V1' es llamada una implicación, porque el valor de 'nivel' implica el valor de 'V1' en el controlador.
Hay muchas maneras de definir la implicación, se puede elegir una función matemática distinta en cada caso para representar a la implicación.
Cada regla puede ser interpretada como una relación difusa como Ri: ( X ? Y ) ? [ 0, 1 ].
Cuando usamos una conjunción A ? B, la interpretación de las reglas if-then sería "es verdadero que A y B cumplen simultáneamente".
Esta relación es simétrica y puede ser invertida. La relación R es computada por el método de Mamdani utilizando el operador Min.
La representación de la relación difusa R del modelo entero es dado por la disjunción (unión) de las K relaciones de cada regla individual Ri.

IMPLICACION

MODUS PONENS GENERALIZADO
Premisa 1: x es A’
Premisa 2: Si x es A entonces y es B
Consecuente: entonces y es B’
El principio anterior establece que en la medida que A’ sea similar a A, entonces se puede deducir un B’ que es similar a B. Obsérvese que el MP es un caso especial del MPG cuando A’ es completamente igual A entonces B’ es B. Por otra parte, regla composicional se basa en el siguiente principio intuitivo:
dados dos conjuntos difusos A y B definidos en los conjuntos universos X e Y respectivamente,
si existe una relación R entre A y B definida en X x Y,
entonces a partir del conjunto A se puede deducir B a través de la composición entre A y la relación R de la siguiente forma:
B = A ? R

INFERENCIA
µA?B
Si x es A entonces y es B
R
x ? A’
µA’
y ? B’
µB’

INFERENCIA
El grado de cumplimiento del i antecedente de cada regla sería:
Para un conjunto difuso singleton la ecuación anterior se simplifica:
El conjunto difuso de salida del modelo lingüístico es:

EJEMPLO
A’
B’

EJEMPLO
R : si x es A entonces y es B
µA?B

EJEMPLO
= max [ ?A’(x) ? ?A(x) ] = max ( [0; 0.5; 0; 0; 0] ? [0; 0.5; 1; 0.5; 0] )
= max [0; 0.5; 0; 0; 0] = 0.5
B’ = ? ? B = 0.5 ? [0; 0.5; 1; 0.5; 0]
B’ = 0.5 ? [0; 0.5; 0.5; 0.5; 0]
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |